31 KiB
ROS 2 tracing
Design document for ROS 2 tracing, instrumentation, and analysis effort.
Table of contents
- Introduction
- Goals and requirements
- Instrumentation design
- Design & implementation notes
- Architecture
- Tools packages
- Analysis
Introduction
Tracing allows to record run-time data from a system, both for system data (e.g., when a process is being scheduled, or when I/O occurs) and for user-defined data. This package helps with user-defined trace data within the ROS 2 framework, e.g. to trace when messages arrive, when timers fire, when callbacks are being run, etc.
Goals and requirements
Goals
- Provide low-overhead tools and resources for robotics software development based on ROS 2.
- Make tracing easier to use with ROS.
Requirements: instrumentation
Instrumentation should be built around the main uses of ROS 2, and should include relevant information:
- Overall
- When creating a publisher/subscriber/service/client/etc., appropriate references should be kept in order to correlate with other tracepoints related to the same instance.
- Publishers & subscriptions
- When creating a publisher/subscription, the effective topic name should be included (i.e. including namespace and after remapping).
- When publishing a message, some sort of message identifier should be included in the tracepoint so it can be tracked through DDS up to the subscriber's side.
- Callbacks (subscription, service, client, timer)
- Callback function symbol should be included, whenever possible.
- Information about callback execution (e.g. start & end) should be available.
- Timers
- Information about the period should be available.
- Executors
- Information about spin cycles & periods should be available.
- Others
- Provide generic tracepoints for user code.
Requirements: analysis & visualization
Analyses process trace data. They should be general enough to be useful for different use-cases, e.g.:
- Callback duration
- Time between callbacks (between two callback starts and/or a callback end and a start)
- Message age (as the difference between processing time and message timestamp)
- Message size
- Memory usage
- Execution time/proportion accross a process' nodes/components
- Interruptions (noting that these may be more useful as time-based metrics instead of overall statistics):
- scheduling events during a callback
- delay between the moment a thread becomes ready and when it's actually scheduled
- CPU cycles
with mean, stdev, etc. when applicable.
Generic tracepoints for ROS 2 user code could be applied to a user-provided model for higher-level behaviour statistics and visualization.
Tools/accessibility
To make tracing ROS 2 more accessible and easier to adopt, we can put effort into integrating LTTng session setup & recording into the ROS 2 launch system and command line interface.
This might include converting existing tracetools scripts to more flexible Python scripts, and then plugging that into the launch system and creating a ros2cli extension.
Instrumentation design
This section includes information about ROS 2's design & architecture through descriptions of the main execution flows. The instrumentation can then be built around that.
Flow description
Process creation
In the call to rclcpp::init(), a process-specific rclcpp::Context object is fetched and CLI arguments are parsed. Much of the work is actually done by rcl through a call to rcl_init(). This call processes the rcl_context_t handle, which is wrapped by the Context object. Also, inside this call, rcl calls rmw_init() to process the rmw context (rmw_context_t) as well. This rmw handle is itself part of the rcl_context_t handle.
This has to be done once per process, and usually at the very beginning. The components that are then instanciated share this context.
sequenceDiagram
participant process
participant rclcpp
participant Context
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
process->>rclcpp: rclcpp::init(argc, argv)
Note over rclcpp: fetches process-specific Context object
rclcpp->>Context: init(argc, argv)
Note over Context: allocates rcl_context_t handle
Context->>rcl: rcl_init(out rcl_context_t)
Note over rcl: validates & processes rcl_context_t handle
rcl->>rmw: rmw_init(out rmw_context_t)
Note over rmw: validates & processes rmw_context_t handle
rcl-->>tracetools: TP(rcl_init, rcl_context_t *)
Node/component creation
In ROS 2, a process can contain multiple nodes. These are sometimes referred to as "components."
These components are instanciated by the containing process. They are usually classes that extend rclcpp::Node, so that the node initialization work is done by the parent constructor.
This parent constructor will allocate its own rcl_node_t handle and call rcl_node_init(), which will validate the node name/namespace. rcl will also call rmw_create_node() to get the node's rmw handle (rmw_node_t). This will be used later by publishers and subscriptions.
sequenceDiagram
participant process
participant Component
participant rclcpp
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
process->>Component: Component()
Component->>rclcpp: : Node(node_name, namespace)
Note over rclcpp: allocates rcl_node_t handle
rclcpp->>rcl: rcl_node_init(out rcl_node_t, node_name, namespace)
Note over rcl: validates node name/namespace
Note over rcl: populates rcl_note_t
rcl->>rmw: rmw_create_node(node_name, local_namespace) : rmw_node_t
Note over rmw: creates rmw_node_t handle
rcl-->>tracetools: TP(rcl_node_init, rcl_node_t *, rmw_node_t *, node_name, namespace)
Publisher creation
The component calls create_publisher(), a rclcpp::Node method for convenience. That ends up creating an rclcpp::Publisher object which extends rclcpp::PublisherBase. The latter allocates an rcl_publisher_t handle, fetches the corresponding rcl_node_t handle, and calls rcl_publisher_init() in its constructor. rcl does topic name expansion/remapping/validation. It creates an rmw_publisher_t handle by calling rmw_create_publisher() of the given rmw implementation and associates with the node's rmw_node_t handle and the publisher's rcl_publisher_t handle.
If intra-process publishing/subscription is enabled, it will be set up after creating the publisher object, through a call to PublisherBase::setup_intra_process(), which calls rcl_publisher_init().
sequenceDiagram
participant Component
participant rclcpp
participant Publisher
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Component->>rclcpp: create_publisher(topic_name, options, use_intra_process)
Note over rclcpp: (...)
rclcpp->>Publisher: Publisher(topic_name, options)
Note over Publisher: allocates rcl_publisher_t handle
Publisher->>rcl: rcl_publisher_init(out rcl_publisher_t, rcl_node_t, topic_name, options)
Note over rcl: populates rcl_publisher_t
rcl->>rmw: rmw_create_publisher(rmw_node_t, topic_name, qos_options) : rmw_publisher_t
Note over rmw: creates rmw_publisher_t handle
rcl-->>tracetools: TP(rcl_publisher_init, rcl_node_t *, rcl_publisher_t *, rmw_publisher_t *, topic_name, depth)
opt use_intra_process
rclcpp->>Publisher: setup_intra_process()
Publisher->>rcl: rcl_publisher_init(...)
end
Subscription creation
Subscription creation is done in a very similar manner.
The componenent calls create_publisher(), which ends up creating an rclcpp::Subscription object which extends rclcpp::SubscriptionBase. The latter allocates an rcl_subscription_t handle, fetches its rcl_node_t handle, and calls rcl_subscription_init() in its constructor. rcl does topic name expansion/remapping/validation. It creates an rmw_subscription_t handle by calling rmw_create_subscription() of the given rmw implementation and associates it with the node's rmw_node_t handle and the subscription's rcl_subscription_t handle.
If intra-process publishing/subscription is enabled, it will be set up after creating the subscription object, through a call to Subscription::setup_intra_process(), which calls rcl_subscription_init(). This is very similar to a normal (inter-process) subscription, but it sets some flags for later.
sequenceDiagram
participant Component
participant rclcpp
participant Subscription
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Component->>rclcpp: create_subscription(topic_name, callback, options, use_intra_process)
Note over rclcpp: (...)
rclcpp->>Subscription: Subscription(topic_name, callback, options)
Note over Subscription: allocates rcl_subscription_t handle
Subscription->>rcl: rcl_subscription_init(out rcl_subscription_t, rcl_node_t, topic_name, options)
Note over rcl: populates rcl_subscription_t
rcl->>rmw: rmw_create_subscription(rmw_node_t, topic_name, qos_options) : rmw_subscription_t
Note over rmw: creates rmw_subscription_t handle
rcl-->>tracetools: TP(rcl_subscription_init, rcl_node_t *, rcl_subscription_t *, rmw_subscription_t *, topic_name, depth)
opt use_intra_process
rclcpp->>Subscription: setup_intra_process()
Subscription->>rcl: rcl_subscription_init(...)
end
rclcpp-->>tracetools: TP(rclcpp_subscription_callback_added, rcl_subscription_t *, &any_callback)
Executors
An rclcpp::executor::Executor object is created for a given process. It can be a SingleThreadedExecutor or a MultiThreadedExecutor.
Components are instanciated, usually as a shared_ptr through std::make_shared<Component>(), then added to the executor with Executor::add_node().
After all the components have been added, Executor::spin() is called. SingleThreadedExecutor::spin() simply loops forever until the process' context isn't valid anymore. It fetches the next rclcpp::AnyExecutable (e.g. subscription, timer, service, client), and calls Executor::execute_any_executable() with it. This then calls the relevant execute*() method (e.g. execute_timer(), execute_subscription(), execute_intra_process_subscription(), execute_service(), execute_client()).
sequenceDiagram
participant process
participant Executor
participant tracetools
process->>Executor: Executor()
Note over process: instanciates components
process->>Executor: add_node(component)
process->>Executor: spin()
loop until shutdown
Executor-->>tracetools: TP(?)
Note over Executor: get_next_executable()
Note over Executor: execute_any_executable()
Note over Executor: execute_*()
end
Subscription callbacks
Subscriptions are handled in the rclcpp layer. Callbacks are wrapped by an rclcpp::AnySubscriptionCallback object, which is registered when creating the rclcpp::Subscription object.
In execute_*subscription(), the Executor asks the Subscription to allocate a message though Subscription::create_message(). It then calls rcl_take*(), which calls rmw_take_with_info(). If that is successful, the Executor then passes that on to the subscription through rclcpp::SubscriptionBase::handle_message(). This checks if it's the right type of subscription (i.e. inter vs. intra process), then it calls dispatch() on the rclcpp::AnySubscriptionCallback object with the message (cast to the actual type). This calls the actual std::function with the right signature.
Finally, it returns the message object through Subscription::return_message().
sequenceDiagram
participant Executor
participant Subscription
participant AnySubscriptionCallback
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Note over Executor: execute_subscription()
Executor->>Subscription: create_message(): std::shared_ptr<void>
Executor->>rcl: rcl_take*(rcl_subscription_t, out msg) : ret
rcl->>rmw: rmw_take_with_info(rmw_subscription_t, out msg, out taken)
Note over rmw: copies available message to msg if there is one
opt RCL_RET_OK == ret
Executor->>Subscription: handle_message(msg)
Note over Subscription: casts msg to its actual type
Subscription->>AnySubscriptionCallback: dispatch(typed_msg)
AnySubscriptionCallback-->>tracetools: TP(callback_start, this, is_intra_process)
Note over AnySubscriptionCallback: std::function(...)
AnySubscriptionCallback-->>tracetools: TP(callback_end, this)
end
Executor->>Subscription: return_message(msg)
Message publishing
To publish a message, an object is first allocated and then populated by the Component (or equivalent). Then, the message is sent to the Publisher through publish(). This then passes that on to rcl, which itself passes it to rmw.
TODO add inter- vs. intra-process execution flow TODO talk about IntraProcessManager stuff?
sequenceDiagram
participant Component
participant Publisher
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Note over Component: creates a msg
Component->>Publisher: publish(msg)
Note over Publisher: ...
Publisher->>rcl: rcl_publish(rcl_publisher_t, msg)
rcl->>rmw: rmw_publish(rmw_publisher_t, msg)
rmw-->>tracetools: TP(?)
Service creation
Service server creation is similar to subscription creation. The Component calls create_service() which ends up creating a rclcpp::Service. In its constructor, it allocates a rcl_service_t handle, then calls rcl_service_init(). This processes the handle and validates the service name. It calls rmw_create_service() to get the corresponding rmw_service_t handle.
sequenceDiagram
participant Component
participant rclcpp
participant Service
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Component->>rclcpp: create_service(service_name, callback)
Note over rclcpp: (...)
rclcpp->>Service: Service(rcl_node_t, service_name, callback, options)
Note over Service: allocates a rcl_service_t handle
Service->>rcl: rcl_service_init(out rcl_service_t, rcl_node_t, service_name, options)
Note over rcl: validates & processes service handle
rcl->>rmw: rmw_create_service(rmw_node_t, service_name, qos_options) : rmw_service_t
Note over rmw: creates rmw_service_t handle
rcl-->>tracetools: TP(rcl_service_init, rcl_node_t *, rcl_service_t *, rmw_service_t *, service_name)
Service-->>tracetools: TP(rclcpp_service_callback_added, rcl_service_t *, &any_callback)
Service callbacks
Service callbacks are similar to subscription callbacks. In execute_service(), the Executor allocates request header and request objects. It then calls rcl_take_request() and passes them along with the service handle.
rcl calls rmw_take_request(). If those are successful, then the Executor calls handle_request() on the Service. This casts the request to its actual type, allocates a response object, and calls dispatch() on its AnyServiceCallback object, which calls the actual std::function with the right signature.
For the service response, Service calls rcl_send_response() which calls rmw_send_response().
sequenceDiagram
participant Executor
participant Service
participant AnyServiceCallback
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Note over Executor: execute_service()
Note over Executor: allocates request header and request
Executor->>rcl: rcl_take_request(rcl_service, out request_header, out request) : ret
rcl->>rmw: rmw_take_request(rmw_service_t, out request_header, out request, out taken)
opt RCL_RET_OK == ret
Executor->>Service: handle_request(request_header, request)
Note over Service: casts request to its actual type
Note over Service: allocates a response object
Service->>AnyServiceCallback: dispatch(request_header, typed_request, response)
AnyServiceCallback-->>tracetools: TP(callback_start, this)
Note over AnyServiceCallback: std::function(...)
AnyServiceCallback-->>tracetools: TP(callback_end, this)
Service->>rcl: rcl_send_response(rcl_service_t, request_header, response)
rcl->>rmw: rmw_send_response(rmw_service_t, request_header, response)
end
Client creation
Client creation is similar to publisher creation. The Component calls create_client() which ends up creating a rclcpp::Client. In its constructor, it allocates a rcl_client_t handle, then calls rcl_client_init(). This validates and processes the handle. It also calls rmw_create_client() which creates the rmw_client_t handle.
sequenceDiagram
participant Component
participant Node
participant Client
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Component->>Node: create_client(service_name, options)
Node->>Client: Client(service_name, options)
Note over Client: allocates a rcl_client_t handle
Client->>rcl: rcl_client_init(out rcl_client_t, rcl_node_t, service_name, options)
Note over rcl: validates and processes rcl_client_t handle
rcl->>rmw: rmw_create_client(rmw_node_t, service_name, qos_options) : rmw_client_t
Note over rmw: creates rmw_client_t handle
rcl-->>tracetools: TP(rcl_client_init, rcl_node_t *, rcl_client_t *, rmw_client_t *, service_name)
Client request
A client request has multiple steps. The Component (or the owner of the Client) first creates a request object. It then calls Client::async_send_request() with the request. It can also provide a callback, but it's optional. The Client passes that on to rcl by calling rcl_send_request(). rcl generates a sequence number and assigns it to the request, then calls rmw_send_request(). Once this is done, the Client puts this sequence number in an internal map along with the created promise and future objects, and the callback (which might simply be empty).
At this point, the Client could simply let its callback be called. It can also use the future object returned by async_send_request(), and call rclcpp::spin_until_future_complete(). This waits until the future object is ready, or until timeout, and returns.
If this last call was successful, then the Component can get the result and do something with it.
sequenceDiagram
participant Component
participant Executor
participant Client
participant rclcpp
participant rcl
participant rmw
participant tracetools
Note over rmw: (implementation)
Note over Component: creates request
Component->>Client: async_send_request(request[, callback]) : result_future
Client->>rcl: rcl_send_request(rcl_client_t, request, out sequence_number)
Note over rcl: assigns sequence_number
rcl-->>tracetools: TP?(rcl_send_request, rcl_client_t *, sequence_number)
rcl->>rmw: rmw_send_request(rmw_client_t, request, sequence_number)
Note over Client: puts sequence_number in a map with promise+callback+future
Component->>rclcpp: spin_until_future_complete(result_future) : result_status
Note over Executor: execute_client()
Note over Executor: creates request_header and response objects
Executor->>rcl: rcl_take_response(rcl_client_t, out request_header, out response) : ret
rcl-->>tracetools: TP?()
rcl->>rmw: rmw_take_response(rmw_client_t, out request_header, out response, out taken)
opt RCL_RET_OK == ret
Executor->>Client: handle_response(request_header, response)
Note over Client: gets sequence_number from request_header
Client-->>tracetools: TP?()
Note over Client: gets promise+callback+future from its map
Note over Client: callback(future)
end
rclcpp->>Component: ready or timeout
opt SUCCESS == result_status
Note over Component: result_future.get() : result
Note over Component: do something with result
end
Timer creation
Timer creation is similar to subscription creation. The Component calls create_service() which ends up creating a rclcpp::WallTimer. In its constructor, it creates a rclcpp::Clock object, which (for a WallTimer) is simply a nanosecond clock. It then allocates a rcl_timer_t handle, then calls rcl_timer_init(). This processes the handle and validates the period.
Note that rcl_timer_init() can take a callback as a parameter, but right now that feature is not used anywhere (nullptr is given), and callbacks are instead handled in the rclcpp layer.
sequenceDiagram
participant Component
participant Node
participant WallTimer
participant rcl
participant tracetools
Component->>Node: create_wall_timer(period, callback)
Node->>WallTimer: WallTimer(period, callback, Context)
Note over WallTimer: creates a Clock object
Note over WallTimer: allocates a rcl_timer_t handle
WallTimer->>rcl: rcl_timer_init(out rcl_timer_t, Clock, rcl_context_t, period)
Note over rcl: validates and processes rcl_timer_t handle
rcl-->>tracetools: TP(rcl_timer_init, rcl_timer_t *, period)
WallTimer-->>tracetools: TP(rclcpp_timer_callback_added, rcl_timer_t *, &callback)
Timer callbacks
Timer callbacks are similar to susbcription callbacks. In execute_timer(), the Executor calls execute_callback() on the WallTimer. The timer then calls rcl_timer_call() with its rcl_timer_t handle and checks if the callback should be called.
If it that is the case, then the timer will call the actual std::function. Depending on the std::function that was given when creating the timer, it will either call the callback without any parameters or it will pass a reference of itself.
sequenceDiagram
participant Executor
participant WallTimer
participant rcl
participant tracetools
Note over Executor: execute_timer()
Executor->>WallTimer: execute_callback()
WallTimer->>rcl: rcl_timer_call(rcl_timer_t) : ret
Note over rcl: validates and updates timer
opt RCL_RET_TIMER_CANCELED != ret && RCL_RET_OK == ret
WallTimer-->>tracetools: TP(callback_start, &callback)
Note over WallTimer: std::function(...)
WallTimer-->>tracetools: TP(callback_end, &callback)
end
Design & implementation notes
Targeted tools/dependencies
The targeted tools or dependencies are:
- LTTng for tracing
- pandas and Jupyter for analysis & visualization
Design
The plan is to use LTTng with a ROS wrapper package like tracetools for ROS 1. The suggested setup is:
- a tracing package (e.g.
tracetools) wraps calls to LTTng - ROS 2 is instrumented with calls to the tracing package, therefore it becomes a dependency and ships with the core stack
- by default, the tracing package's functions are empty -- they do not do anything
- if users wants to enable tracing, they need to
- install LTTng
- compile the tracing package from source, setting the right compile flag(s)
- overlay it on top of their ROS 2 installation
- use other package(s) for analysis and visualization
Architecture
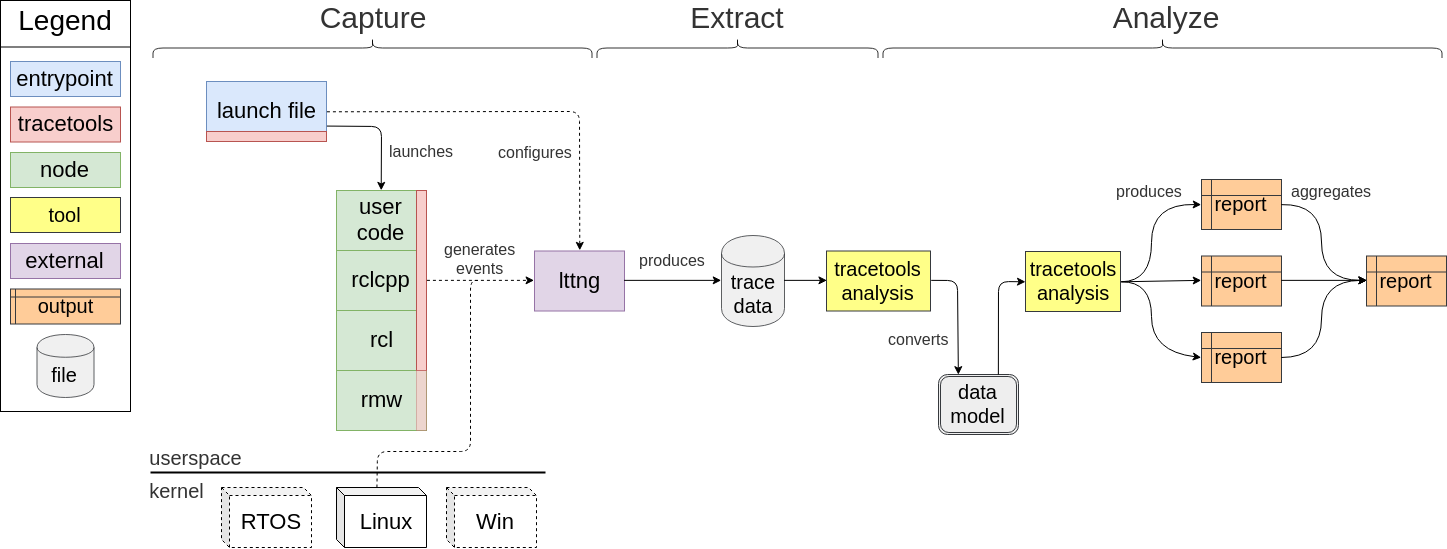
Timeline
The first goal is to statically instrument ROS 2, aiming for it to be in the ROS 2 E-turtle release (Nov 2019).
This includes transposing the existing ROS 1 instrumentation to ROS 2, wherever applicable. This step may not include instrumenting DDS implementations, and thus may be limited to the layer(s) right before rmw.
Notes on client libraries
ROS offer a client library (rcl) written in C as the base for any language-specific implementation, such as rclcpp and rclpy.
However, rcl is obviously fairly basic, and still does leave a fair amount of implementation work up to the client libraries. For example, callbacks are not handled in rcl, and are left to the client library implementations.
This means that some instrumentation work will have to be re-done for every client library that we want to trace. We cannot simply instrument rcl, nor can we only instrument the base rmw interface if we want to dig into that.
This effort should first focus on rcl and rclcpp , but rclpy should eventually be added and supported.
ROS 1/2 compatibility
We could look into making analyses work on both ROS 1 and ROS 2, through a common instrumentation interface (or other abstraction).
Tools packages
tracetools_trace- wraps the LTTng Python bindings to setup and start a tracing session
- exposes simplified setup functions with default values
- provides an example
traceentrypoint for tracing$ ros2 run tracetools_trace trace
ros2trace- provides a
ros2cliextension$ ros2 trace- uses
tracetools_tracefunctions
- uses
- provides a
tracetools_launch- provides a
Traceaction forlaunch- uses
tracetools_tracefunctions
- uses
- provides a
tracetools_read- wraps the babeltrace Python bindings to read CTF traces
tracetools_test- provides a
TraceTestCaseclass extendingunittest.TestCase- uses the
Traceaction withlaunchto trace the test nodes - provides trace-specific utility functions (e.g. assert)
- uses the
- provides a
tracetools_analysis- uses
tracetools_readto read traces - provides utilities to:
- convert CTF traces to pickle files
- wrap trace events in Python
dict - handle and process trace events to gather data
- uses
ros2trace_analysis- provides a
ros2cliextension with verbs$ ros2 trace-analysis
- uses/exposes
tracetools_analysisfunctions$ ros2 trace-analysis convert$ ros2 trace-analysis process
- provides a
@startuml
interface babeltrace
hide babeltrace fields
hide babeltrace methods
hide babeltrace circle
interface lttng
hide lttng fields
hide lttng methods
hide lttng circle
interface pandas
hide pandas fields
hide pandas methods
hide pandas circle
interface bokeh
hide bokeh fields
hide bokeh methods
hide bokeh circle
package <i>ros2cli</i> as ros2cli <<Rectangle>> #DADADA {
}
package <i>launch</i> as launch <<Rectangle>> #DADADA {
}
lttng -[hidden] babeltrace
babeltrace -[hidden] pandas
pandas -[hidden] bokeh
ros2cli -[hidden] launch
launch -[hidden] lttng
package tracetools_trace <<Rectangle>> {
}
lttng <-- tracetools_trace
package ros2trace <<Rectangle>> {
}
package tracetools_launch <<Rectangle>> {
}
ros2cli <|-- ros2trace
tracetools_trace <-- ros2trace
launch <|-- tracetools_launch
tracetools_trace <-- tracetools_launch
package tracetools_read <<Rectangle>> {
}
babeltrace <-- tracetools_read
package tracetools_test <<Rectangle>> {
}
tracetools_launch <-- tracetools_test
tracetools_read <-- tracetools_test
package tracetools_analysis <<Rectangle>> {
}
tracetools_read <-- tracetools_analysis
pandas <--- tracetools_analysis
bokeh <--- tracetools_analysis
package ros2trace_analysis <<Rectangle>> {
}
ros2cli <|-- ros2trace_analysis
tracetools_analysis <-- ros2trace_analysis
@enduml
Analysis
Analysis design
Generally, for a given trace data analysis objective, the following classes are extended: EventHandler, DataModel, and DataModelUtil.
A user/developer can implement an EventHandler, which defines callbacks for specific events. Those callbacks get called by the Processor, and end up putting slightly-processed data into a DataModel, which is a data container that uses pandas DataFrames.
Meaningful data can be extracted from the DataModel. However, a DataModelUtil can provide common utility functions so that users don't have to re-write them. This meaningful output data can then be presented through a Jupyter notebook (e.g. plots) or a normal Python script (e.g. tables).
Analysis architecture
With profiling as an example implementation:
@startuml
class Processor {
+process(events)
-_process_event(event)
-_expand_dependencies(initial_handlers): list {static}
-_get_handler_maps(handlers): multimap {static}
}
class DependencySolver {
+solve(initial_dependants): list
}
DependencySolver <-- Processor
abstract class Dependant {
+dependencies(): list {static}
}
abstract class EventHandler {
+handler_map(): map
+data(): DataModel
+process(events) {static}
}
class ProfileHandler {
+_handle_sched_switch(event, metadata)
+_handle_function_entry(event, metadata)
+_handle_function_exit(event, metadata)
}
Dependant <|-- EventHandler
EventHandler <|-- ProfileHandler
Processor o-- EventHandler
abstract class DataModel {
+print_data() {abstract}
}
class ProfileDataModel {
+times: DataFrame
+add_duration(tid, depth, name, timestamp, duration)
}
DataModel <|-- ProfileDataModel
ProfileDataModel o-- ProfileHandler
abstract class DataModelUtil {
+print_data(): DataModel
+convert_time_columns(df, columns): df {static}
}
class ProfileDataModelUtil {
+get_tids(): list
+get_function_duration_data(tid): DataFrames
}
DataModelUtil <|-- ProfileDataModelUtil
DataModelUtil o-- DataModel
class Notebook {
}
Notebook --> ProfileHandler
Notebook --> ProfileDataModelUtil
Notebook --> Processor
hide Notebook circle
@enduml